BIM - Building Information Modeling I Management - Band 2
Digitale Planungswerkzeuge in der interdisziplinären Anwendung
Das 2. Standardwerk aus dem Hause DETAIL zum Thema Building Information Modeling (BIM) in der Praxis arbeitet die Qualitäten wie auch die Herausforderungen im Umgang mit der Digitalisierung des Bauwesens und mit BIM heraus.
Wie schon im ersten Band von 2015 mit dem Titel „BIM – Building Information Modeling / Management. Methoden und Strategien für den Planungsprozess, Beispiele aus der Praxis“ widmet sich auch das zweite Buch von Eva Maria Herrmann und Tim Westphal vor allem der Arbeitspraxis in den Büros. Neben sogenannten Global Playern und mittelständischen Büros und Unternehmen kommen auch ausgewählte Protagonisten des ersten Bandes erneut zu Wort, ziehen ihr persönliches Resümee und geben wertvolle Einblicke in ihre BIM-Arbeit (strategisch und operativ).
Roland Pawlitschko im Gespräch mit Prof. Heike Klussmann, Forschungsplattform BAU KUNST ERFINDEN, Universität Kassel
Plotbot/Crawler – einen universell einsetzbarer Fassadenroboter.
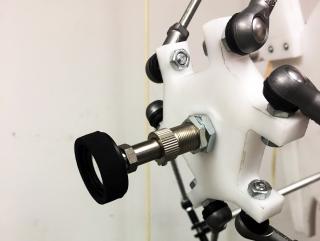
Ganz egal, ob vertikale Fassaden nun intelligent sind oder nicht – nach einiger Zeit stehen Sanierungen an oder müssen Beschichtungen erneuert werden, und es steht die Frage im Raum, wie gut diese Flächen erreichbar sind. Im Zeitalter von Physical Computing und Industrie 4.0 beschäftigen sich Forscher natürlich nicht mit dem Gerüstbau, sondern entwickeln einen leicht bedienbaren, webbasierten, sensorgeführten Bewegungsautomaten, der im Fall des Plotbot/ Crawlers die Lösung eines konkreten Anwendungsproblems zum Gegenstand hat. Hinter dem hierzu gehörenden Forschungsvorhaben der Forschungsinitiative Zukunft Bau steht die Forschungsplattform BAU KUNST ERFINDEN am Fachbereich Architektur, Stadtplanung, Landschaftsplanung der Universität Kassel und ihr Spin-off, die Kennwert KW GmbH, die zuvor im Projekt „DysCrete“ einen farbstoffsensitivierten, energieerzeugenden Beton entwickelt haben. Hierbei werden Funktionsschichten, die Licht nach den Prinzipien der technischen Photosynthese in elektrische Energie umwandeln können, auf die Betonoberfläche aufgetragen – wobei manche dauerhaft mit dem Beton verbunden sind, während andere von Zeit zu Zeit erneuert werden müssen. Der Fassadenroboter Plotbot/Crawler eignet sich zum Auftragen dieser Funktionsschichten, lässt sich aber auch so modifizieren, dass er noch andere Funktionssysteme aufnehmen kann. „Vor der Entwicklung des Plotbot/Crawlers haben wir unterschiedliche Fassadenrobotersysteme bzw. Robotiksysteme untersucht, die für Arbeiten an senkrechten Flächen geeignet sind“, sagt Prof. Heike Klussmann, Leiterin der Forschungsplattform Bau Kunst Erfinden. „Dazu gehören Fassadenklimmer, die sich direkt an der Fassade fortbewegen – hier funktioniert die Anhaftung über Vakuum, Magnetismus oder elektrostatische Kräfte. Das zweite Prinzip sind Drohnen und Multikopter, die zwar flexibel, aber windanfällig sind und wegen der Stromversorgung mittels Akkus nur über eine begrenzte Betriebsdauer verfügen.“ Als drittes System kamen die mit Stadionkameras vergleichbaren Seil-Parallelroboter ins Spiel. Plotbot/Crawler besteht aus zwei Teilen: Ein ringförmiger Teil ist als mobile Basis auf einem Seilsystem montiert, das Bewegungen in x- und y-Achsenrichtung zulässt. Für Bewegungen in der z-Achse gibt es vier Propeller.


„Durch die präzise steuerbaren Seillängen ist der Seilroboter nicht anfällig für Wind, Schlupf oder andere mechanische Einflüsse. Wird von den beiden nichttragenden Spulen Seil abgewickelt, bewegt sich das Gerät kontrolliert von der Wand weg und kann dadurch Hindernisse wie etwa Fenster, Simse, Vor- und Rücksprünge überwinden“ erklärt Prof. Heike Klussmann das Prinzip. Innerhalb des Rings befindet sich dann das Funktionswerkzeug, der H-Bot, „das im Prinzip wie eine Zeichenschiene funktioniert und aus drei Linearführungen mit jeweils einem aufmontierten beweglichen Schlitten besteht“, sagt Klussmann. Im Rahmen des DysCrete-Projektes wurde ein Tintenstrahl-Sprüh-Druckkopf mit einem Druckbereich von 25 x 25 Zentimeter entwickelt, mit dem Farbstoffsolarzellen, aber auch andere, von der Forschungsplattform Bau Kunst Erfinden entwickelte Sensorsysteme gedruckt werden können. „Darüber hinaus können – unter Verwendung geeigneter Druckköpfe – auch Pigment-Beschichtungen, Versiegelungen, Leitsysteme und dekorative Schichten aufgetragen oder Feuchtigkeit, Risse und anderen Defekte an Fassaden detektiert werden.“ Die potenziellen Anwendungsgebiete sind breit gefächert und vielversprechend.

Über das Buch
- Artikel Titel
- Plotbot/Crawler – ein universell einsetzbarer Fassadenroboter
- Verlag
- Detail Fachbuch
- Ort
- München
- Hrg.
-
- Eva Maria Herrmann
- Tim Westphal
- Datum
- 01.12.2017
- ISBN
- ISBN 978-3-95553-406